Tool Used
Approach
I started this project on a breadboard and with an Arduino that had a working USB port.
Following a guide to build a motor controller using a diode and resistors, I layed out the circuit on the breadboard using jumper wires.
Once the motor circuit worked, I added a servo and the IR reciever to the board.
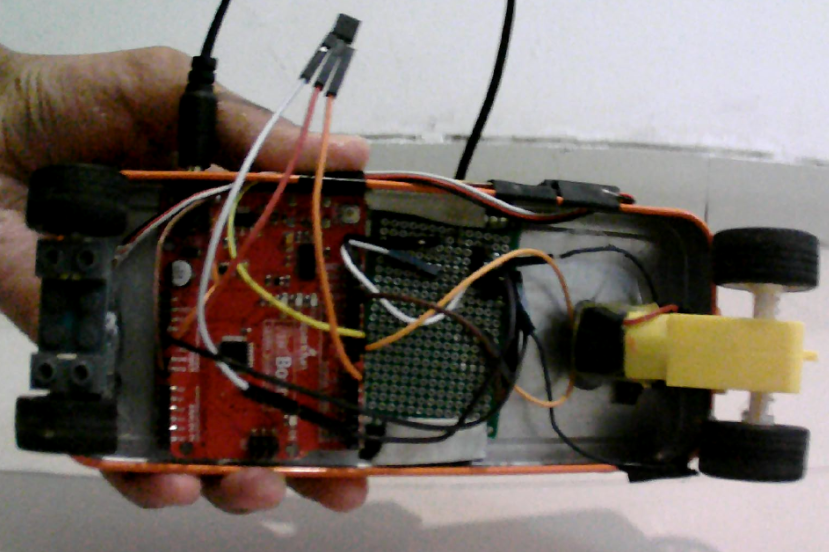
To reduce the size of the circuit, I decided to solder the components on a Zero-PCB. As I did not want to permanently use the reciever, motor and the servo in this project, I added header pins which could connect to jumper wires.
Also, I had an unused Arduino with a broken USB port which I thought would be sufficient as the car wont be connected to the computer except for while programming. So, to program it I used the other Arduino and the ISP sketch which allowed me to upload code directly without using USB Serial.
At this stage it was still spread out on a table and only after I confirmed all functions were working, did I start to make a cardboard frame.
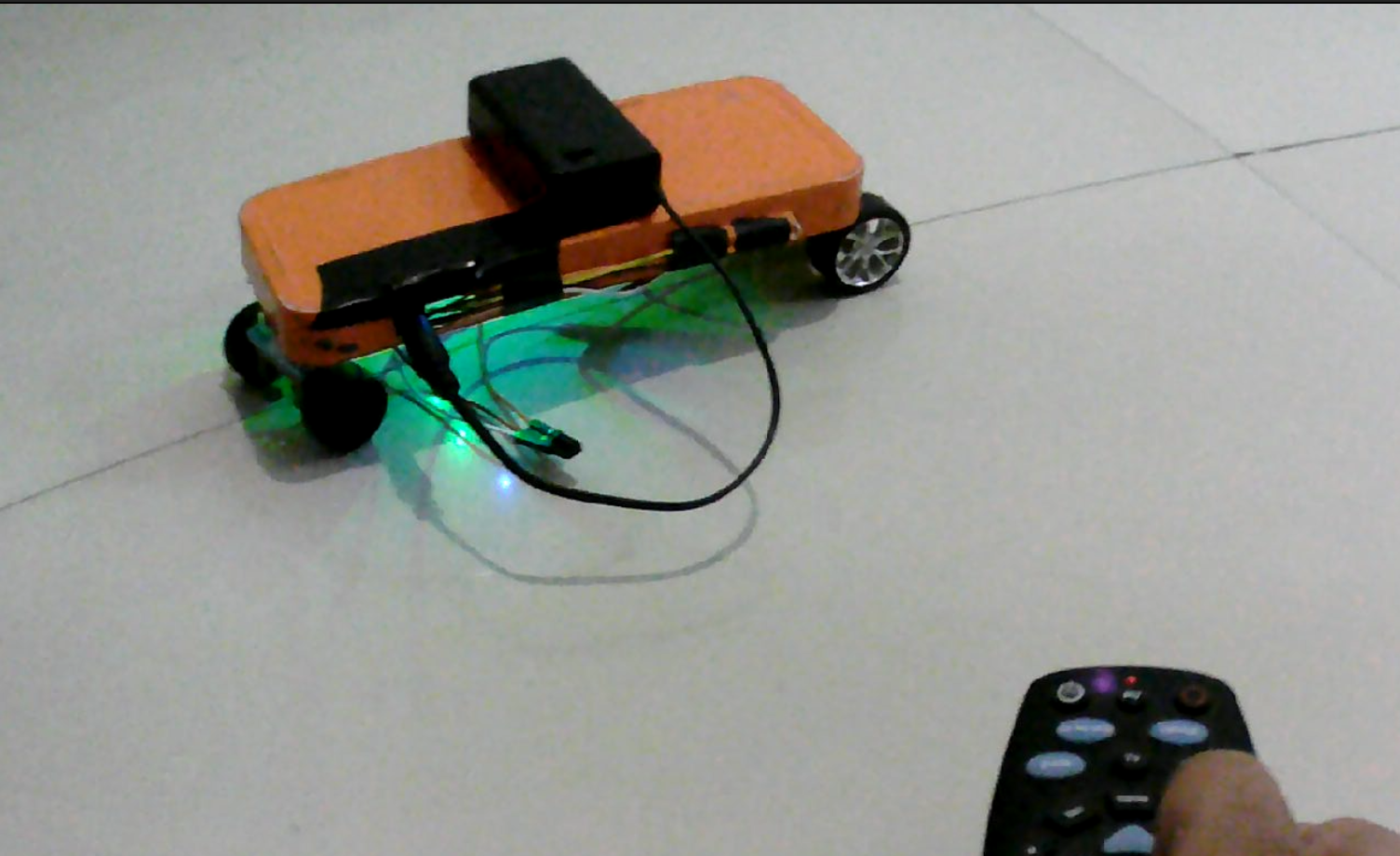
The cardboard version lasted for exactly one day of testing, and quickly fell apart. It was time to find a more rigid solution. I did think of designing and 3D printing a model, but then saw a broken metal box lying around which looked perfect for the job. With some hot-glue and double sided tape, I affixed the components, and did minimal cable management.
Learnings
This project gave me insight into how motor controllers work, and was my first time working on a Zero-PCB. I gained valuable experience soldering thru-hole with flux (and desoldering with a solder sucker, as I made quite a mess from time to time)
Next Steps
I would like to explore PCB designing and printing to minimise messy solder work and build more robust projects.
The car could also have many other sensors (ultrasonic, camera etc.) to facillitate autonomous navigation.
It would be interesting to explore other mechanisms for wheel turning, including four-wheel drive.